The DREAM project uses various robots, from mobile robots to robots that can manipulate objects with a robotic hand. Here are some of them:
Willow Garage's PR2
The PR2 combines both a mobile robotics platform and two robotic arms for manipulation. The PR2 is mainly used for implementing exploration of the environment using its arms, in order to build a representation of the world, including static and dynamic properties of objects lying around. The PR2, Baxter and the Bioloid's robotic arm will be used as complementary platforms for validation purposes.
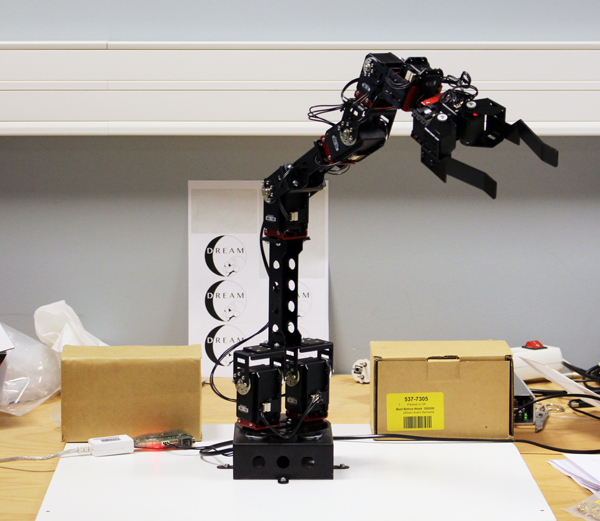
CrustCrawler's robotic arm
This robotic arm is build out of Dynamixel's servomotors and manufactured by CrustCrawler robotics. It provides a low-cost solution for object manipulation. Combined with a camera, this robot enables to study the exploration and manipulation of objects with a relatively loose actuator, but which provides more degrees of freedom than any other robots in the project. The Dynamixel's robotic arm, PR2 and Baxter will be used as complementary platforms for validation purposes. Learn more about the CrustCrawler robotic arm
|
RaspberryPI-powered Thymio-2
Thymio-2 were originally designed at EPFL, and mostly targeted for educational use. They cheap and reliable, and have been extended with an inexpensive but powerful Raspberry PI 2, plus an on-board camera and battery. These extended Thymios are primarily used for the social learning part of the project. Rethink robotics' Baxter
The Baxter robot, manufactured by Rethink Robotics, is a relativery cheap robot with two compliant arms, which means that it can handle unforeseen interactions -- notably with humans -- without damage, neither for the robot, nor for the object or human it interacts with. Baxter, PR2 and the Bioloid's robotic arm will be used as complementary platforms for validation purposes.
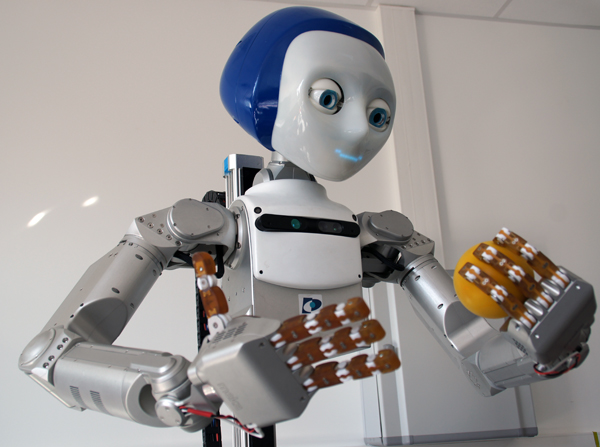
Meka robot
The Meka robot is a mobile manipulator developed by Meka Robotics (acquired by Google in 2013). It is equipped with two 7-DOF forced controlled arms with dexterous hands, an omni-directional mobile base and an expressive head. It also carries two cameras in its eyes and a RGB-D camera in its torso. The Meka robot is yet another platform for the manipulation scenario. |



.png)